Фізика - Чолпан П.П. 2003
Частина 1 МЕХАНІКА
Розділ 1 КІНЕМАТИКА
1.3. Прискорення. Прискорення при криволінійному русі
Градієнт швидкості матеріальної точки V з часом £ характеризують прискоренням

Прискорення виражається в метрах на секунду в квадраті (СІ) та сантиметрах на секунду в квадраті (СГС).
При прямолінійному русі вектор швидкості напрямлений уздовж однієї й тієї самої прямої — траєкторії, внаслідок чого напрям вектора![]() збігається з напрямом вектора
збігається з напрямом вектора![]() або протилежний до нього. Якщо
або протилежний до нього. Якщо![]() збігається за напрямом із
збігається за напрямом із![]() , то швидкість збільшується і рух буде прискореним. Якщо
, то швидкість збільшується і рух буде прискореним. Якщо![]() протилежне за напрямом до
протилежне за напрямом до![]() , то швидкість зменшується і рух буде сповільненим.
, то швидкість зменшується і рух буде сповільненим.
Прямолінійний рух зі сталим прискоренням називають рівнозмінним. Залежно від зміни швидкості в часі розрізняють рівномірно прискорений та рівномірно сповільнений рухи. При рівнозмінному прямолінійному русі справедлива формула
![]()
де![]() — швидкість у момент часу t;
— швидкість у момент часу t; ![]() 0 — швидкість у початковий момент часу (при t = 0);
0 — швидкість у початковий момент часу (при t = 0);![]() — прискорення. При цьому вектори
— прискорення. При цьому вектори![]() ,
, ![]() 0,
0,![]() напрямлені вздовж однієї прямої.
напрямлені вздовж однієї прямої.
Визначимо прискорення точки у разі її руху по криволінійній траєкторії (рис. 1.2). Нехай у момент часу t точка була в положенні А, а в момент часу t + Δt — у положенні В. Швидкості![]() 1і
1і![]() 2 у точках А і В напрямлені по дотичних до траєкторії в цих точках. Перенесемо вектор
2 у точках А і В напрямлені по дотичних до траєкторії в цих точках. Перенесемо вектор![]() 2 в точку А. Зміна швидкості за проміжок часу Δt визначиться вектором
2 в точку А. Зміна швидкості за проміжок часу Δt визначиться вектором ![]() Із рис. 1.2. бачимо, що
Із рис. 1.2. бачимо, що
![]()
Тоді прискорення в точці А запишемо так:

Вектор  називають нормальним прискоренням, а вектор
називають нормальним прискоренням, а вектор  - тангенціальним. Прискорення
- тангенціальним. Прискорення![]() n перпендикулярне до вектора швидкості
n перпендикулярне до вектора швидкості![]() 1 і завжди напрямлене до центра кривизни. Звідси й назва цього вектора — нормальний (тобто перпендикулярний).
1 і завжди напрямлене до центра кривизни. Звідси й назва цього вектора — нормальний (тобто перпендикулярний).
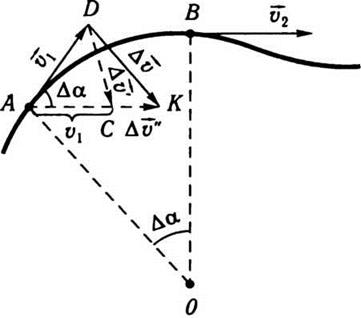
Рис. 1.2.
Визначимо модуль нормального прискорення. Як видно з рис. 1.2, для малого кута Δα можна записати

Тоді
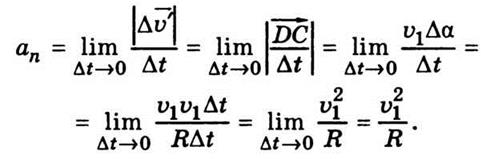
Отже, модуль![]() п у деякій точці траєкторії дорівнює відношенню квадрата швидкості до радіуса кривизни траєкторії в цій самій точці:
п у деякій точці траєкторії дорівнює відношенню квадрата швидкості до радіуса кривизни траєкторії в цій самій точці:
![]()
Якщо на нормалі до траєкторії відкласти в точці А одиничний вектор![]() , що напрямлений до центра кривизни, то вектор нормального прискорення можна записати так:
, що напрямлений до центра кривизни, то вектор нормального прискорення можна записати так:
![]()
Розглянемо тепер вектор тангенціального прискорення
Зазначимо, що модуль вектора Δ ![]() ’ дорівнює за абсолютною величиною різниці модулів
’ дорівнює за абсолютною величиною різниці модулів![]() 2 та
2 та![]() 1 (див. рис. 1.2). Тоді
1 (див. рис. 1.2). Тоді

Відповідно тангенціальне прискорення
Отже, значення тангенціального прискорення дорівнює першій похідній від швидкості за часом або другій похідній_від шляху. Напрям вектора![]() τ визначається напрямом вектора Δ
τ визначається напрямом вектора Δ ![]() ’, який він набуває в граничному випадку, коли Δt —> 0. Неважко побачити, що в граничному випадку вектор Δ
’, який він набуває в граничному випадку, коли Δt —> 0. Неважко побачити, що в граничному випадку вектор Δ ![]() ’ напрямлений по дотичній до траєкторії в точці А. Звідси і назва цього вектора — тангенціальний (дотичний). Якщо ввести одиничний вектор
’ напрямлений по дотичній до траєкторії в точці А. Звідси і назва цього вектора — тангенціальний (дотичний). Якщо ввести одиничний вектор![]() , дотичний до траєкторії і напрямлений у бік руху точки, то вектор тангенціального прискорення можна записати так:
, дотичний до траєкторії і напрямлений у бік руху точки, то вектор тангенціального прискорення можна записати так:

Вектор![]() τ показує, як змінюється швидкість за числовим значенням, а вектор
τ показує, як змінюється швидкість за числовим значенням, а вектор![]() n характеризує зміну швидкості за напрямом. Отже, для повного прискорення запишемо
n характеризує зміну швидкості за напрямом. Отже, для повного прискорення запишемо

Модуль вектора загального прискорення знайдемо із співвідношення

Перша публікація: 01/01/2008
Останнє оновлення: 30/12/2023
Редакційна та навчальна адаптація: Даний матеріал зведено на основі першоджерела/оригінального тексту. Команда проєкту здійснила редакційне оглядове опрацювання, виправлення технічних неточностей, структурування розділів та адаптацію змісту до навчального формату.
Що було опрацьовано:
- усунення форматних дефектів (OCR-помилки, розриви структури, дефектні символи);
- редакційне упорядкування змісту;
- уніфікація термінів відповідно до академічних джерел;
- перевірка відповідності фактичних тверджень тексту першоджерела.
Усі згадки про автора, рік видання та походження первинного тексту збережено відповідно до джерела.